
需要计算的。而且是实时三维的计算。
要不然为什么婴儿要一岁多才能学会走路?
而且好玩的是,一旦计算多次能运行后,这些数据就会封装起来变成一个个模块,你需要的时候加载一下就行了。
比如基础走路模块、爬楼梯模块,进阶的骑自行车模块、高阶的攀岩模块、滑雪模块等等。
你一旦学会骑自行车,就再也不用学习第二次了。
《生活大爆炸》有这么个桥段:
如果楼梯其中有一节存在短短两毫米的差距,就可能会摔断锁骨!
虽然这是个搞笑的段子,但是如果台阶中间的楼梯出现显著差距,是真的会提高摔倒的概率。
这个显著差距是:6 毫米。
六毫米,这个高度也就比你手机上的一个汉字高一点点。
如果中间一级台阶超过 1 厘米,那么它百分百会每天引起摔跤。

纽约布鲁克林 36 街地铁站的台阶就藏了这么一节"杀手台阶":
这一节比其他台阶高出半英寸(约 1.27 厘米),然后就每天有人被绊倒:

当然发现这个现象以后官方也是及时修正了问题,避免更大的风险。
我们国家的楼梯也有规定,同一梯段内允许施工偏差为≤5mm(有条件最好控制在 3mm 以内),相邻的不同梯段误差必须小于 10mm。
这一切都是因为人类走路的时候是个高速运转的自动计算机,面对楼梯这种规整的地段,身体只会计算前几步的运行策略,后面的阶梯全都是自动代入的,所以如果出现了误差,那么身体的计算就会出差错。
人体就是这么精妙而神奇。
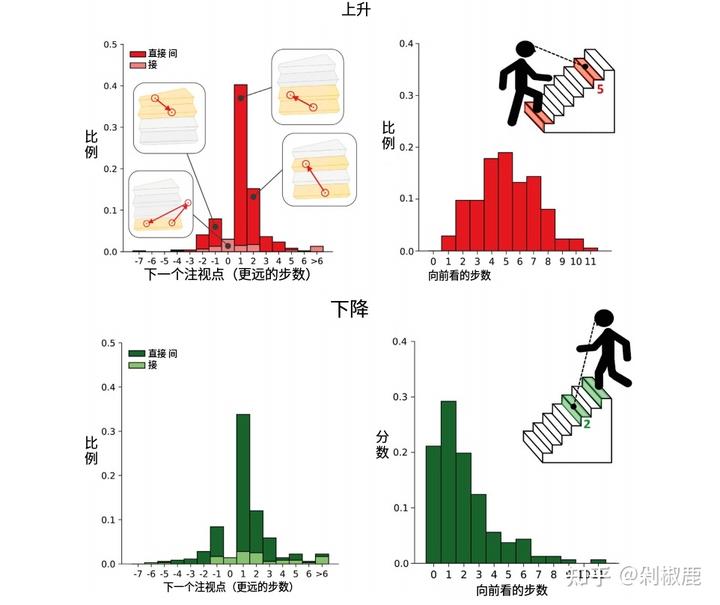
研究人员曾进行过一次上下楼梯人们到底在看哪里的实验。
发现上楼梯时平均前瞻 5 步(但不同人变动比较大);下楼时平均前瞻 2 步。
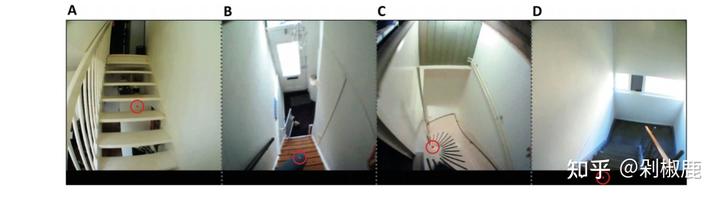
不同的楼梯注视方向不同:
所以本来这是一套为了快速通过设计的高效系统,但是如果中间出现一步误差,那么就会像导航地图为您重新规划路线一样,身体会及时调整,但是神经信号传导有延迟,大脑收到的时候会冷不丁的:“什么鬼,谁说要重新规划路线了?”然后反应的这一瞬间就绊倒了。
诶,等等等等,所以走路的时候身体和大脑是分头行动的嘛?
那我们先来做个实验,你家的楼梯你肯定是最熟悉的,现在你先来看一眼楼梯,然后再闭着眼睛试着走上去看能不能做到(请不要一个人单独做这个实验)。
你会发现,你居然能做到。
那我们如果把实验做夸张一点,比如把大脑“切掉”呢?
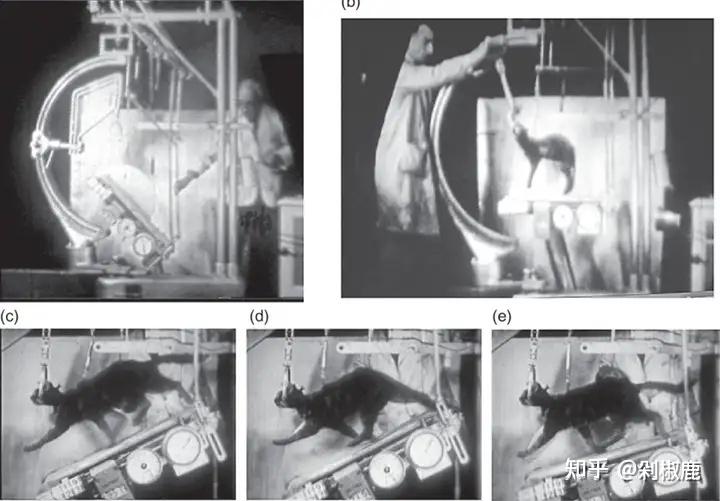
在 1906 年,爱猫专家,哦不对,神经生理学家做了一些实验。
把猫在脑干处进行切断,切断这个连接后,脊髓和脑干仍然正常工作,但是大脑皮层被架空了,相当于没有了大脑,这个猫就成为了去大脑动物,(decerebrate cat)。
实验证明即便没了大脑皮层的指挥,猫仍然可以表现出初级的踏步动作,并且走得还比较平稳。
随后,其他神经胜利学家做出了类似观察,同样使用的是去大脑猫,证明了脊椎可以独立控制四肢的一些基本运动。
虽然有点残忍,但是这样的实验即使得出了去大脑猫可以运动的结论。
既然没有大脑也可以运动,那么脊髓中肯定拥有能够控制四肢运动的神经回路。
科学家们称作中枢模式发生器(CPG)。
中枢模式发生器在当时(20 世纪初)也还只是一种假说。
不过后面更多深入的研究,发现中枢模式发生器这个神经回路确实广泛存在于四足动物当中。
中枢模式发生器可以在没有与大脑运动皮层相连的情况下,控制四肢运动,包括游泳、行走和跳跃等节律性运动。
但是这个算法很低级,有点像回力车:

回力车你往后拉一下,它就会自动往前走。
但是不能控制方向,且不会精确避障,只能物理避障,物理避障的意思是撞到哪里停哪里。
去大脑猫也是这么个情况。
且没有大脑皮层的话,动物会失去目的,也就是不知道要去哪里,怎么出发,需要大脑发出“走路”的指令,中枢模式发生器才会开始执行简单的走路、游泳等代码。
上面那个实验中科学家是用电刺激代替大脑发出的指令,身体才开始走路。
这里可以看出,“走路”这个代码其实是写好了储存在中枢模式发生器里,但是路况往往很复杂,还需要多个部位一起协调。
我们走路时最主要接受信号的系统是这三个:
- 视觉
- 前庭系统
- 本体感觉
视觉:用来避障和检视路况(选择你熟悉的路径规划)。
这里简单介绍一下无人机、扫地机器人等采用双目避障的设备,常用的计算方法。
首先将两个摄像头看到的内容比较相似的像素点,进行像素点匹配。
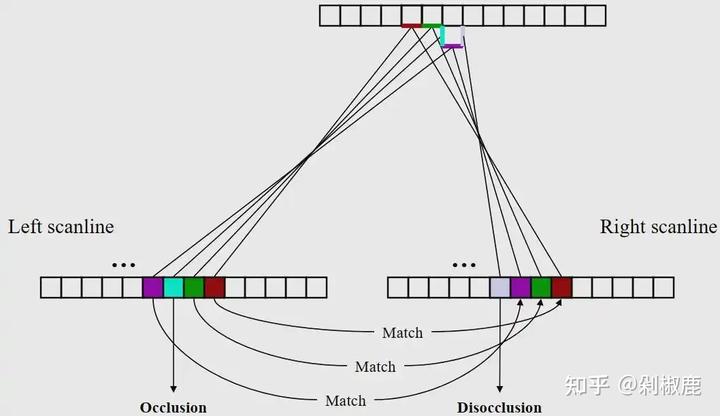
然后根据两个摄像头的视差,计算障碍物的实际距离。
从而再根据自己的行进速度和时间精准的调节,即将接近障碍物精确避障。
这一切,在生物体的常年累月的观察下,居然只要几秒就能计算完成,从而避开障碍物,是不是很神奇?
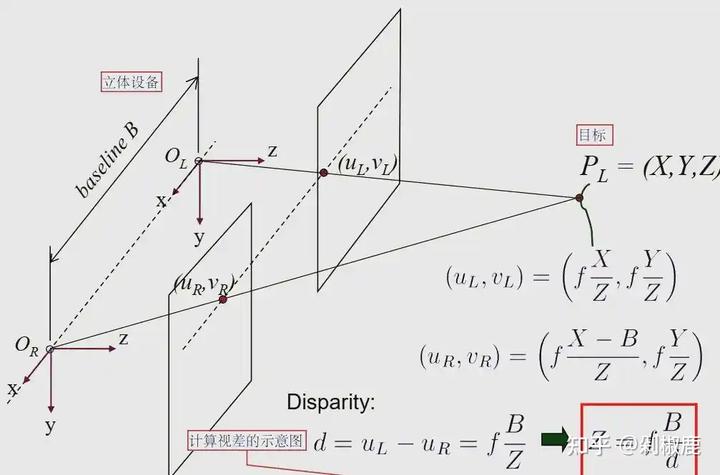
这里先介绍一下视差的概念:
为什么人眼能够直观感觉到物体的远近?这是因为两只眼睛看到的东西有视差。
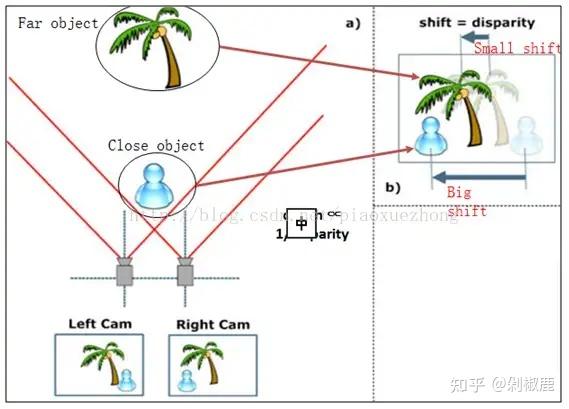
双眼视差有时候也被称为立体视差,是一种深度线索。物体离观察者越近,两只眼睛所看到物体的差别也越大,这就形成了双眼视差。
大脑可以利用对这种视差的测量,估计出物体到眼睛的距离。
也就是俗称的近大远小,别看成年人觉得近大远小很简单,对于小孩子来说这个需要几年的视觉处理才能形成远近的概念,这也是为什么有些婴儿容易从高处跌落的原因,因为他们还没建立远近高低的概念。
以及猫狗等摇头并不是在卖萌:

这个时候是调整眼睛的角度,计算面前物体的立体形状和距离。
不同动物的立体视觉不一样。
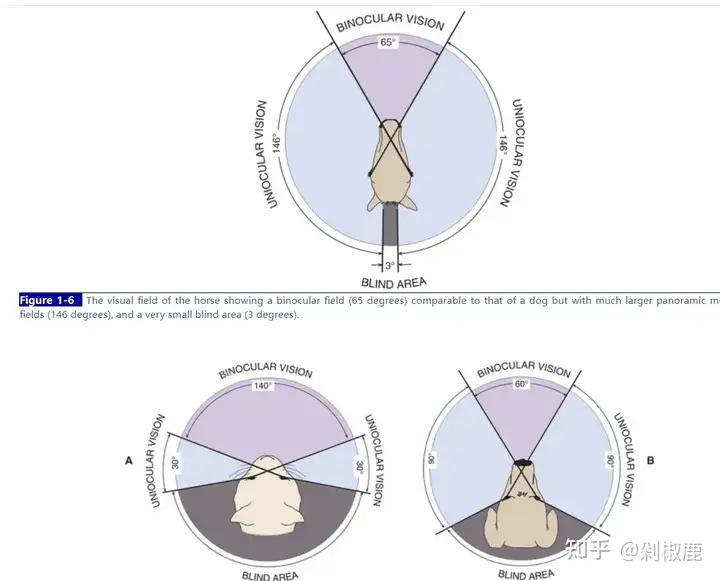
这是马(上)和猫狗单目视野和双目视野以及盲区的区别。
可以看见马的盲区是最少的,但是对应的马立体成像(双目视野)也是最差的。
现在再回头看看人、猫狗的视觉,你会发现人虽然总的可观察视角较小,但是几乎都是双目视觉,所以正视和歪头看到的物体距离是差不多的。
猫虽然视角大,但盲区也多,狗单目视觉范围比较大,双目视觉范围小,所以猫和狗都需要歪着头调整视差来更精准的计算自己和猎物的距离。
这是捕食者才需要的视角,因为计算好了距离才能下决定是否要捕食(爆发时间能否≤距离 / 自己最大速度)。
反观牛马等食草动物,它们拥有更大的单目视觉,而双目视觉只在很小的一个范围,因为它们更需要观察捕食者是否在视野范围内,而不太需要计算距离。
所以食草动物的眼距都更宽广一些,一般是位于头部两侧,方便更大程度地增加视野。
说到这里,你是不是想到了什么?
马牛羊眼睛在面部两侧,双目视觉没那么优秀,所以不擅长计算距离,对陌生地形会相当警惕。
尤其是羊。
因此会有领头羊的说法,遇到不熟悉的道路,只有头羊顺利通过后其他羊才会挨个跟上,要不然不会贸然行动:
前庭系统(内耳): 充当“生物陀螺仪”,计算头部相对于重力的加速度和倾斜度,计算后负责平衡和空间定位。
幼儿的感统训练就是通过特定动作刺激前庭系统,提升身体平衡性、协调性及抗眩晕能力的训练方式。
它适用于改善运动表现、预防跌倒、缓解晕动症,或帮助神经系统损伤患者康复。
当我们坐车头晕的时候,就是因为眼睛看见景色在变化,说明此时可能做了运动,但是身体却一动不动。
这个时候前庭系统就报警了,大脑觉得身体可能吃坏了菌子还是怎么的(打个比方),就开始催你呕吐。
本体感受器(肌肉和关节):
遍布全身的肌肉传感器实时报告:“肌肉拉伸了多少?”,“关节弯曲到了什么位置?”
通过这些数据传送回大脑运动区加工,就能做出一些对应的动作。
因此,我们说的训练肌肉记忆,就是在训练本体感受器和大脑的数据库。
当数据库足够充足的时候,你做一些熟练的运动就是下意识的,不需要去思考诸如到底如何攀岩,如何骑自行车之类的问题。
就像黑客帝国一样,NEO 靠电脑程序加载了一些运动的模块,其实我们的运动模块也是封装好就可以加载的,区别是我们需要自己练习形成自己的肌肉记忆,没有电脑导入这么方便。
因此学自行车是个一次性的过程,当你学会了以后这套代码跑起来,你就很难假装不会了。
所以,走路尤其是人类的双足直立行走其实本质上是一个极其复杂的计算过程,要不然为什么那些仿生机器人的设计师花了这么多年才终于让机器人走得像样乃至跑起来了。
但是如果要做攀岩等极限运动目前还是强机器人所难,毕竟它们算法还没这么强大。
所以机器人是真的走的时候在实时计算,而我们对于走路的计算是基因底层代码和后天习得的数据库叠加,然后内化的过程,不代表我们不需要计算,只是这个计算的过程比较复杂,且在底层,你没有注意到罢了~
以上~
参考资料:
1Where do people look when walking up and down familiar staircases?
2http://vimeo.com/44807536