

这是一个非常好的问题。
说几个自动控制理论发展史上里程碑式的大牛吧,凭记忆,后面会随时更新,如有不对的地方,欢迎评论,我会第一时间更正。
我会尽量将自动控制原理及现代控制理论中出现的人名都串讲一遍,包括且不限于 Watt,Maxwell,Routh,Hurwitz,Lyapunov,Minorsky,Black,Nyquist,Bode,维纳、香农、冯诺依曼,Bellman,Pontryagin,Kalman。。。
内容也尽量涵盖自动控制领域的核心理论的来龙去脉,包括且不限于反馈,传递函数,稳定性判据,pid,时域分析与频域分析,状态空间等等。
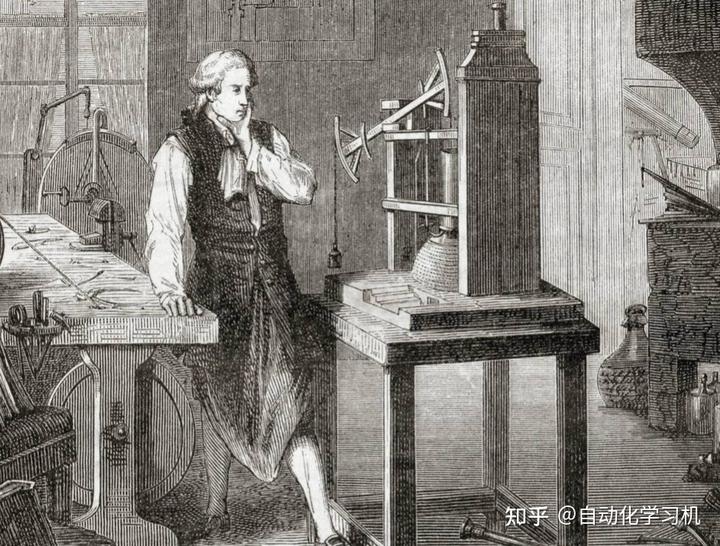
【1】【1788 年】英国发明家 James Watt 发明了飞球调节器,用来控制蒸汽机的转速。
第一个,不用说,詹姆斯·瓦特(James Watt,1736 年 1 月 30 日—1819 年 8 月 25 日),这个被写进文明历史的男人改进了蒸汽机,发明了飞球式调速器(Fly-ball Governor)及反馈机制,但是他没有用数学或者显性语言来进行总结,即使如此,我们应该感谢他不仅掀开了自动化的面纱,更重要的是,他的蒸汽机开启了人类波澜壮阔的工业化时代。
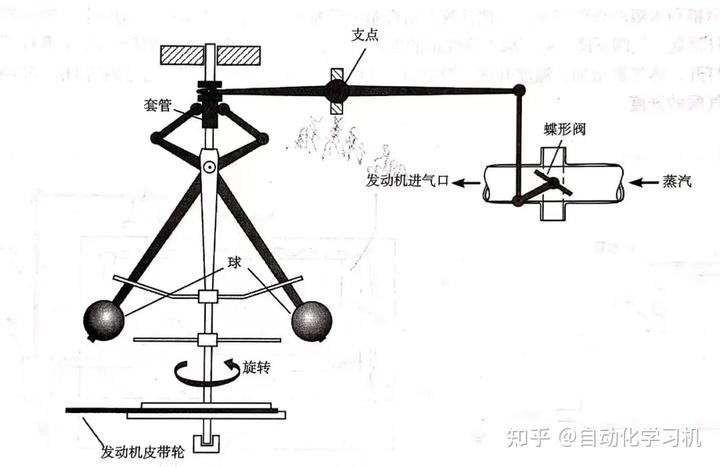

在采用飞轮调速器后,某些情况下,尤其是蒸汽机速度提高的时候,调速器频繁地出现不稳定状况,会发生转速自激振荡,即转速忽快忽慢,循环往复,以致不能工作甚至导致机器损毁,这个现象引起了许多工程师的注意,很多人绞尽脑汁却一筹莫展。
【2】【1868 年】麦克斯韦在给电磁学立法的空档,顺便也给自动控制理论开了光
这就需要引入第二个重要人物了:詹姆斯·克拉克·麦克斯韦(James Clerk Maxwell,1831 年 -1879 年),这尊大神更为大家所熟悉的是他的物理学成就,也就是赫赫有名的统一了电、磁、光统归为电磁场麦克斯韦方程组。
在完善自己的电磁学理论的空暇时间,麦克斯韦顺便研究了蒸汽机普遍存在的振动不稳定问题。但也就是这么一篇顺手的论文,将自动化学科从工程技术带入了科学研究;他是第一次以数学的方式,阐明了控制理论的核心数学模型:微分方程;并且阐明了系统稳定性等价于模型方程的数学根是不是具有负实部。
论文中,麦克斯韦得出了自己对于自激振荡现象的机理分析:当系统内的延迟较大时,导致负反馈变成正反馈,从而引起振荡。
麦克斯韦对调速器的动态进行了如下建模:
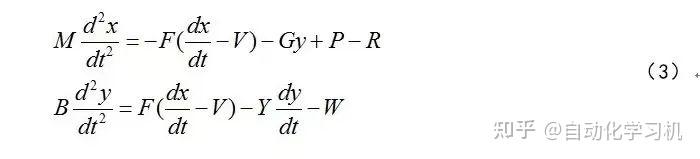
其中 P,R,V,F,的定义同(1),G,Y 亦为增益系数,W 为重物产生的力矩,y 为重物的运动。稳态时,调速器的速度为:

说明系统的稳态值与负载 R(未知外扰)无关。但系统的稳定是有条件的,只有当

即系统(3)的特征方程

的根都具有负实部时,系统才能到达稳态。
事实上,麦克斯韦的这篇文章还表达了今天我们熟知的 PID 控制器的思想萌芽。
他在这篇文章中描述:“大多数调速器依赖于与转轴相连的一块机器部件的离心力。当速度增加时,该 离心力便增加,它或者增加在该部件表面的压力,或者将该部件移离,从而起到刹掣或阀 门的作用。”他指出:“但如果离心力作用在该部件,而不是直接作用在机器上,那么就可以有一个设计,只要运动速度高于某个正常值,就会不断地增加阻力,而在速度低于该 值时则反转其作用,使得无论在驱动或阻力方面发生任何变化(在机器的工作范围内), 这个调速器都会将速度引导到同一个标准值。”文中他把只有比例控制的调速器称为 Moderator,而把具有比例及积分控制的调速器称为 Genuine governor。
麦克斯韦教会了工程师们通过求解特征方程的根来判断系统的稳定性。但是随着微分方程的阶数增加,老老实实的求根过程将变得枯燥且漫长。因此,工程师迫切地希望找出一种快速判断系统稳定性的方法,于是就引出了经典控制理论的几个经典判据,这几个判据的本质就是在于当时计算力有限的情况下,通过某种转换,将求微分方程根的解析问题,化为类代数问题,就类似于对数表将繁冗的计算化简一样。
【3】劳斯与赫尔维茨在麦克斯韦的指引下,将解微分方程化为类代数问题,我们称之为劳斯 - 赫尔维茨稳定性判据。
第三个,劳斯(dward John Routh,1831 年– 1907 年)和赫尔维茨(Adolf Hurwitz,1859 年 –1919 年),在麦克斯韦的基础上提出了劳斯判据,将解微分方程的问题化解为代数问题;
这里有个八卦,那就是 routh 与 maxwell 的关系。routh 与 maxwell 是剑桥大学的同学。凡是了解过麦克斯韦电磁学方程的,都知道 maxwell 的数学是非常好的,正是他将另一个著名物理学家法拉第的发现用严谨的数学语言表述出来。作为牛顿的母校,剑桥每年会搞本科数学比赛 (Senior Wrangler)评选本届数学毕业生名次,而 maxwell 毕业的时候,只获得了本届的第二名,第一名是谁呢?routh 笑而不语,正是在下。
由于劳斯 - 赫尔维茨判据主要针对的是线性时不变系统。当面对非线性、时变系统时将无能为力。这个时候在欧洲的东侧,有一个俄国的数学家以数学的方式,基本上解决了这一问题。
【4】【1892 年】俄国的李雅普诺夫提出了更为普遍性的稳定性判定理论
控制理论的重镇,一个是英国(后来转移至美国),另一个就是俄国。
这个人就是第四个里程碑人物,李雅普诺夫(Aleksandr Mikhailovich Lyapunov,1857 年 6 月 6 日-1918 年 11 月 3 日)。
1892 年,李雅普诺夫发表了博士论文《运动稳定性的一般问题》,提出了李雅普诺夫第一方法与第二方法。
第一方法又称为间接法,具体做法与麦克斯韦相似:在平衡点附近,对非线性系统进行线性化,然后通过根的实部判定系统的稳定性。
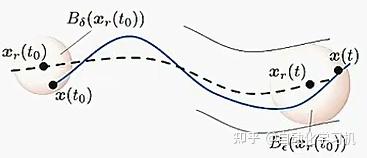
第二方法又称为直接法,具体做法是:引入具有广义能量属性的李雅普诺夫函数,分析该函数导数的符号。当函数是正定且有界的,其导数是负定且有界时,系统是稳定的;反之不稳定。
李雅普诺夫的方法适用于线性、非线性系统,时变、时不变系统,连续、离散时间系统。正由于其广泛的适用性,它在当代的控制理论研究中依然举足轻重。
基于劳斯 - 赫尔维茨判据虽然可以分析系统的稳定性,但稳定分析还不够,工程师真正需要的是控制精度。于是在数学之外,工程师面对控制工程的实际需求,开始八仙过海。
【5】米诺尔斯基在分析船的自动驾驶问题时,推导出了 PID 控制器。
米诺尔斯基(Nicholas Minorsky,1885 年 - 1970 年 )从理论上清晰地分析了船在常值扰动下的自动驾驶问题,推导出了 PID 控制器形式,也就是事实上成为了统治控制工程届的 PID 的发明人:

这里要说明的是米诺尔斯基跟李雅普诺夫都是俄国人,在十月革命后不久,米诺尔斯基移居到了美国。他的工作也主要是基于美国海军的需求而开展的。另外,事实上当时俄国的非线性研究是领先于美国的,也正是米诺尔斯基的翻译工作,也将包括李雅普诺夫等一众俄国数学家的贡献带入了了美国。
【6】布莱克发明了反馈放大器,并正式提出了控制理论的最核心术语“feedback"。【7】奈奎斯特提出了奈奎斯特判据【8】波德提出了波德图分析方法
贝尔实验室(AT&T BellLabs)的工程师以及科学家,发展出控制系统分析与设计的频域方法。重要的包括布莱克、奈奎斯特和波德。
布莱克(Harold Stephen Black,1898-1983)于 1927 年发明负反馈放大器,这也是“反馈(feedback)”一词被正式使用。

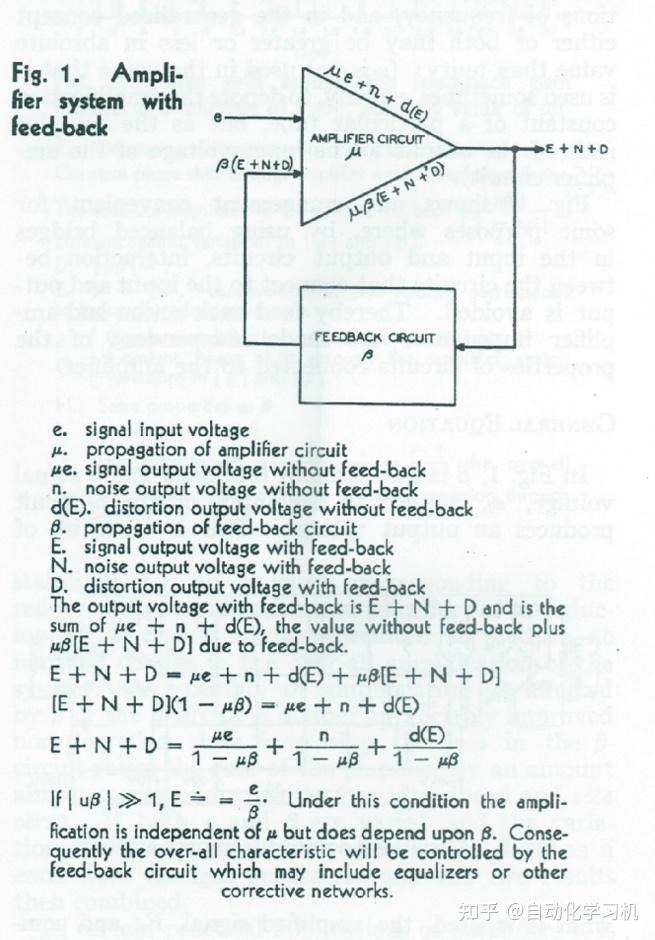
为了减小失真(误差)而引入的反馈装置,有可能会使得系统发出尖叫(Singing/Oscillating)而变得不稳定(反馈的代价:系统复杂了,可能造成系统不稳定)。
这又涉及到了麦克斯韦和劳斯研究过的稳定性问题,但这时,系统的动态特性已经很复杂(通常是几十阶的高阶微分方程),Routh-Hurwitz 判据很难再有帮助。
贝尔电话实验室的通信工程师和科学家们开始考虑用频率响应(Frequency Response)和复变函数理论进行分析,发展出了控制系统分析与设计的频域方法。
负反馈放大器的发明及其发展被认为是发明家、工程师与受过良好数学物理训练的理论研究团队成功合作的杰出案例,其中有两个代表性人物:哈里·奈奎斯特(Harry Nyquist,1889—1976)和亨德里克·博德(Hendrik Bode,1905—1982)。
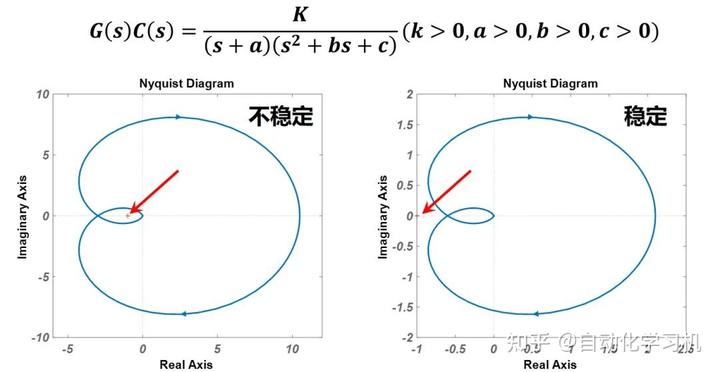
哈里·奈奎斯特(Harry Nyquist,1889—1976)1917 年获得耶鲁大学物理学博士学位,1917—1934 年就职于 AT&T。1928 年,Nyquist 与 AT&T 的其他一些工程师一起与布莱克商讨如何将负反馈放大器用于一种新的电缆通信系统。他做了负反馈系统的分析,并最终在频域上建立了一个与已有工作完全不同的稳定性判据——Nyquist 判据,Nyquist 判据可以直接指导如何调整控制器确保系统稳定。

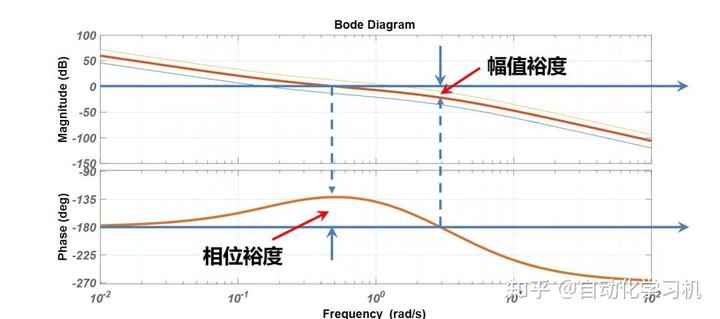
亨德里克·波德(Hendrik Bode,1905—1982)1926 年获得俄亥俄州立大学(Ohio State University)数学硕士学位,然后就职于贝尔实验室,期间又于 1935 年取得哥伦比亚大学(Columbia University)物理博士学位。

1928 年,在开发一种新的同轴电缆通信系统时,Bode 带领一组数学家研究能充分利用 Black 放大器优点的系统设计方法。1940 年,Bode 在其经典论文“Relations Between Attenuation and Phase in Feed back Amplifier Design”中进一步提出了利用频域的 Bode 图、幅值裕度 / 相位裕度等相对稳定性概念来设计负反馈放大器的方法,并指出了系统增益与带宽的极限关系。
【9】维纳正式创立了控制论。
【10】维纳香农创立了信息论,当然香农的贡献为主。
【11】维纳香农冯诺依曼共同提出了计算机架构及原理。
维纳、香农、冯诺依曼等,为了解决控制问题需要的超高算力需求,发明了后来影响深远的计算机,以及正式创立了控制论。
【12】【1954 年】钱学森撰写了工程控制论,正式将控制论工程化,开始落地生根开枝散叶。
钱学森以及同时代的工程学界,将控制论的思想广泛应用于包括导弹在内的各类工程领域,也间接催生了现代控制理论,也就是下面所述的第九、十、十一。
【13】贝尔曼提出了最优化原理和动态规划
贝尔曼,动态规划;贝尔曼(Richard Bellman,1920—1984)在兰德公司(Rand Corporation)数学部工作,他在研究解决导弹部署以达到最大破坏力问题的过程中,提出了“最优性原理(Principle of Optimality)”和“动态规划(Dynamic Programming)”
【13】庞特里亚金提出了极大值原理
第十个,庞特里亚金,极大值原理;航天飞行任务除了落点精度的要求外,系统性能还涉及一些其他限制:如时间最短或燃料消耗最少等,Pontryagin1956 年提出的极大值原理是关于这类最优控制问题的理论基础。
【14】卡尔曼提出了卡尔曼滤波
卡尔曼(Rudolf Emil Kalman,1930 年 5 月 19 日-2016 年 7 月 2 日),发明了卡尔曼滤波。Kalman 滤波则是从带有噪声以及不完全测量的信号中提取所需信号的一种数学算法,成功地在阿波罗登月计划中得以应用;可以说,如果没有卡尔曼滤波,在当时的计算机内存和算力限制下,阿波罗登月是几乎不可能成功的。
卡尔曼滤波器以及其后来对非线性问题的拓展,可能是现代控制理论中应用最广泛的方法。自动驾驶、地震数据处理、过程控制、天气预报、计量经济、健康监测、计算机视觉、电机控制、定位与导航……在无数的领域卡尔曼滤波都发挥着重大作用。
这个老头子很可爱的,活到了 2016,《麻省理工学院技术评论》中纪念他的文章“How an Inventor You've Probably Never Heard of Shaped the Modern World”写到:
“卡尔曼最重要的发明是卡尔曼滤波算法,该算法成就了过去 50 年间的许多基本技术,如把阿波 罗号宇航员送上月球的航天计算机系统、把人类 送去探索深海和星球的机器人载体,以及几乎所 有需要从噪声数据去估算实际状态的项目。有人 甚至把包括环绕地球的卫星系统、卫星地面站及 各类计算机系统在内的整个 GPS 系统合称为一个 巨大无比的卡尔曼滤波器。”

2005 年卡尔曼在布拉格 召开的第 16 届 IFAC 大会上的演说结束时,他显示的 ppt 最后一页留下了后来为大家津津乐道的名言:
1. Get the physics right.
2. After that, it is all mathematics.

(未完待续)