
 没错,我就是那个物理所。
没错,我就是那个物理所。
这天,同事给小编发了段视频,说要考考小编。

“怎么把轮子拆开就不能平衡了呢?”
自行车的问题,能难倒我小·十二年骑车老司机·编?

要知道这种自行车为啥不能平衡,那我们只要从普通自行车为啥能平衡来分析就可以。
普通自行车能保持平衡,不就是因为。。。

因为啥呢?
如果说怎么控制自行车平衡,这个问题小编可太知道了,写篇论文都没问题。
但为什么自行车能平衡?

难道小编这么多年骑了个假的自行车?
带着问题,小编试图查资料找到答案。这一查还吓一跳,原来自行车平衡的问题已经困扰了科学界上百年之久,还真不简单。
01 自行车:我赌你不懂我的平衡
据说最早的自行车,是 1790 年,一个法国人觉得四轮马车太占地方,于是一拍脑袋直接去掉一半,只留了两个轮,这就有了自行车的雏形。

经过几百年的发展,自行车经过各种奇奇怪怪的设计,最终成为现在大家常见的形状。
就是这样一种大家都十分熟悉的交通工具,却让科学家们犯了难。
如果问空调调控温度的原理,科学家们可以给你讲讲卡诺循环。
如果问遥控器的原理,科学家们可以从红外线与编码序列来讲。
但是自行车作为一种生活经验产物,发明的时候就没有考虑过为什么能平衡,当后人试图对其解析时,却发现了一个又一个的问题。
为什么只有骑起来之后才能维持不倒呢,速度在其中起了什么样的作用?将自行车用力推出去,自行车没有人控制也能保持平衡,这又是为什么呢?

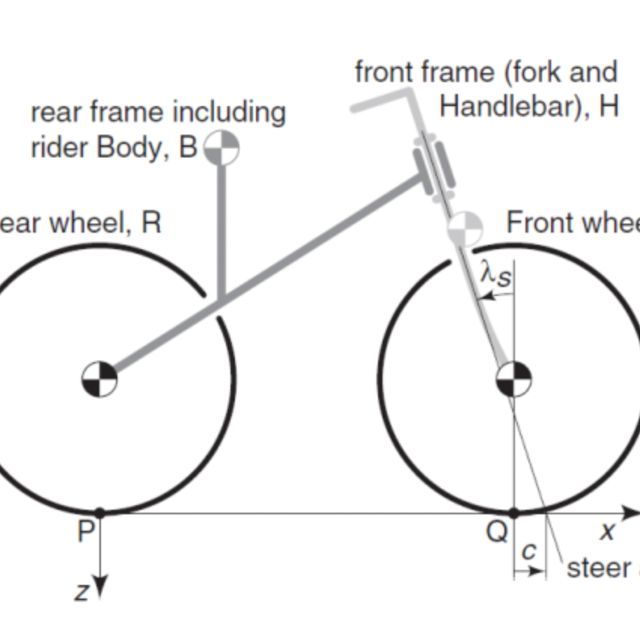
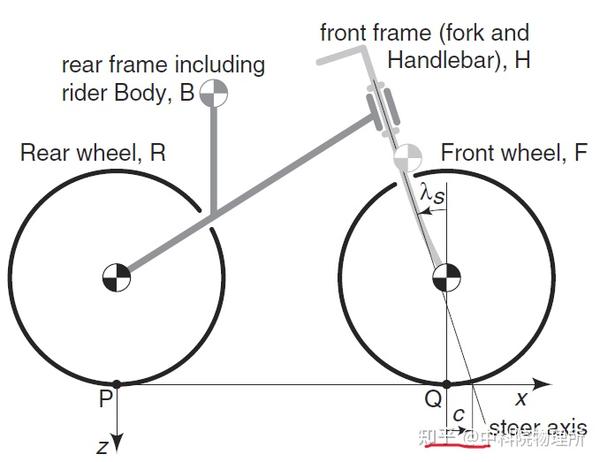
在自行车发明的百年之后,英国数学家弗朗西斯•惠普尔(Francis Whipple)推导出了惠普尔模型,这个模型用四个刚体来代表自行车,引入了质量、车轮半径等 25 种参数来描述自行车的运动状态,是世界上最早也最经久不衰的自行车模型之一。
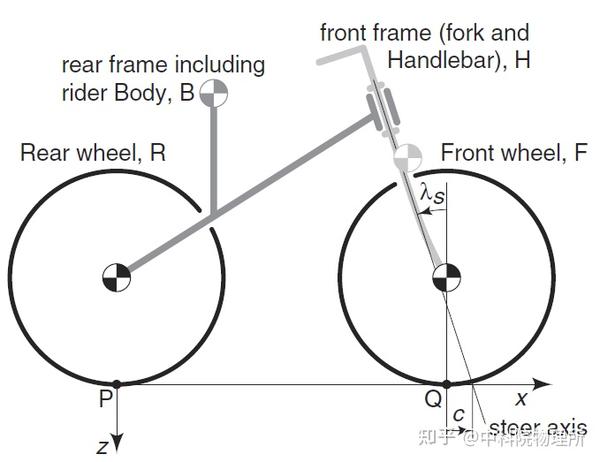
可惜的是这个模型只为我们提供了模拟的方法,而没有指出其背后的原理。
02 索末菲等:陀螺效应可解
时间来到 20 世纪,自行车平衡问题悬而未决,吸引了大量的科学家关注,其中就有一位我们物理界的老熟人阿诺德·索末菲(Arnold Sommerfeld)。

他和另外两位科学家:费利克斯 · 克莱因(Felix Klein)和弗里茨 · 诺特(Fritz Noether)共同提出了一种解释——陀螺效应。
什么是陀螺效应呢?
陀螺效应其实是角动量定理的表现,在外力矩作用下,旋转物体角动量改变,产生进动角动量。也就是说,陀螺效应作用下,转动的物体不会直接倒下,而是发生转动方向的改变。
小时候应该都玩过陀螺吧,陀螺旋转过程中,会绕着一个自转轴进行自传,同时这个自转轴还会绕着一个垂直轴进行旋转,这种转动物体的自转轴同时进行旋转的现象就叫做进动。
陀螺的进动状态十分稳定,即使施加一定的外力也可以保持平衡,这就是陀螺效应。像陀螺仪就是利用了陀螺效应,可以维持很大质量的物体不倒。
其实上面这张动图已经说明得非常清楚了,在陀螺效应作用下,轮子克服了重力,形成了进动,通过改变方向维持了自身的平衡。
这种平衡状态与车轮的速度有关,速度越快,车轮的倾角越小,车身越稳定。所以我们在骑车时会发现骑得越快越容易保持平衡。

现在回过头来看一开始的问题,这种车为什么不能平衡呢?
把前轮拆开之后,同一时间只有三分之一的部分能与地面接触,其它的部分没有直接的外力矩作用,无法形成进动,没有陀螺效应使其保持稳定。
03 琼斯:还得看“转向轮后倾”
其实到目前为止,陀螺效应解释了开头的问题,已经很好地说服了小编。
你以为这就结束了?NO!

在索末菲等人提出陀螺效应解释 60 年后,一个叫作大卫 · 琼斯(David Jones)的化学家发表了篇文章,跳出来推翻了陀螺效应解释。
上面不是说陀螺效应适用于常见的车型吗?琼斯说,那我就设计一款不适用的自行车。于是就有了下面图片里的这辆车。

这辆自行车,它有一大一小两个前轮,通过大小前轮之间的传动,让两个前轮向相反的方向旋转。再通过控制大小比例关系,就可以做到两个前轮的角动量大小相等、方向相反,即完全抵消!
角动量都没了,哪里还有陀螺效应?这不就证明了用陀螺效应来解释自行车平衡问题是错误的。
当然琼斯也不是只管推翻不管重建的人,他提出了一个新的理论——转向轮后倾效应(the Caster Effects)。
在这个理论中,有一个重要的概念:前轮轨迹(the trail)。前轮轨迹指的是前轮转向轴延长线与地面交点和前轮与地面接触点之间的距离。如果转向轴交点在接触点之前,前轮轨迹为正;反之则为负。
琼斯指出,当自行车开始倾倒时,正的前轮轨迹会让自行车的前轮在重力作用下发生后倾,带动车头发生转向,自行车通过这个转向,将重心回到车体中间,回归平衡状态。
前轮轨迹越长,自行车也就越稳定(虽然也会越难骑);而负的前轮轨迹则会让自行车无法维持平衡。

这时候再回到我们开局的问题,车轮拆成三份之后,过长的前轮使得车的前轮轨迹在大部分时间都变成了负的,因此就无法维持平衡。
04 施瓦布等:你们说的都对,但...
这么看来,通过“前轮轨迹”确实可以非常方便地判断和解释自行车的平衡问题。

琼斯也对自己提出的这一理论非常自豪。在 40 年后出版的回忆录中,他将这一理论视为自己的伟大成就之一,并宣称:“我现在被誉为现代自行车理论之父”。
I am now hailed as the father of modern bicycle theory.
——David Jones
但是,科学界最不缺少的就是反转。

在琼斯的回忆录出版的第二年(2011 年),一篇发表在Science杂志上的文章横空出世,题为“A Bicycle Can Be Self-Stable Without Gyroscopic or Caster Effects”(自行车可以在没有陀螺效应和转向轮后倾效应作用下保持自稳定)。
这篇文章的研究团队做的事情与琼斯一脉相承:设计一款排除上述效应后仍可维持稳定的自行车。
琼斯的转向轮后倾理论中,前轮是在重力作用下发生的后倾,那就将整个车体的重量进行重新分布,抵消掉负的前轮轨迹的影响。再消除陀螺效应影响,就有了下面这款自行车。
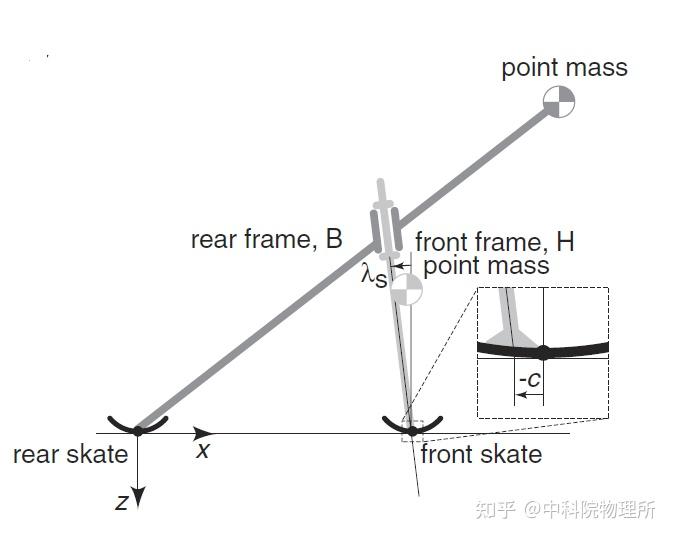
前后轮设计成了上下两个轮子,这两个轮子转向相反,角动量互相抵消;转向轴延长线与地面交点在轮子与地面接触点之后,前轮轨迹为负。
按上面提到两种理论,这种车是无法维持平衡的,但是...

这辆车不止平衡了,还非常稳定。
文章作者解释道,通过将车子重心提前,可以抵消掉负的前轮轨迹带来的影响,这样在倾倒时,前轮依然会后倾带动车子转向,使车子的重心回到中间,恢复平衡。
这也就是自行车维持平衡的第三种方法——改变质量分布。
但是这篇文章并不是在否定前两种解释。
这也是这篇文章突破性的一点。它认为,陀螺效应、转向轮后倾效应以及文中提到的改变质量分布三种理论都能解释自行车的平衡问题,是自行车平衡的充分不必要条件。
细心的读者可能已经发现了,三种理论中都有共同的一点:将车身的倾倒变为转向。这就是自行车能维持平衡的根本原因。
当满足上述三条理论中任意一条时,就可以推断出车子能保持平衡;而当这三条都不满足时,只要能做到将车身的倾倒变为转向,车子也可以保持平衡。
05 后轮:还有人记得我吗?
至此,自行车平衡问题算是得到了解决,但是没有完全解决。
我们知道了自行车维持平衡的根本原因是将倾倒变成转向,也知道了三种可以实现这种转变的理论以及相应的自行车设计。
但我们仍不知道会不会有更多的理论可以实现这种转变,也不知道会不会有一种理论可以达成自行车平衡的充分必要解。我们仍缺少一种关于自行车平衡的“大一统理论”。
哦对了,提醒一下大家不要忘记了后轮。虽然它在三种理论中都没什么存在感(也确实跟它没有关系),但它仍是自行车不可缺少的一部分,少了它,自行车就不能...独轮车也能骑?那没事了。

回到开头的问题,那个自行车不能平衡的问题解决了吗?
解决了,UP 将前轮回归了完整。

参考资料:
- Borrell, B. The bicycle problem that nearly broke mathematics. Nature 535, 338–341 (2016).
- Kooijman JD, Meijaard JP, Papadopoulos JM, Ruina A, Schwab AL. A bicycle can be self-stable without gyroscopic or caster effects. Science. 2011 Apr 15;332(6027):339-42.
- https://mp.weixin.qq.com/s/Z7c5lJJhnG_Hvq-aSnHxDw?scene=25#wechat_redirect
- https://encyclopedia.thefreedictionary.com/bicycle